









Description
- Suspension structure ensure road gripping of each wheel
- Mounts reserve for Ultrasonic and IR sensors
- DC motor with encoders
- Includes Arduino Microcontroller and IO expansion board
- Comes assembled with only wheels not attached
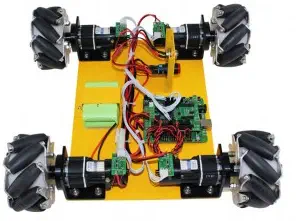
The 4WD Arduino Compatible Basic Mecanum Robot is a four wheels drive mobile kit designed for hobbyists and students to learn about the function of Mecanum wheels. It includes four 12VDC motor with encoders. Its chassis is made of Aluminum-alloy and has pre-drilled holes for microcontroller. Dimensions: 250mm from center of wheel to center of wheel, 350mm overall length; 343.4mm overall width.
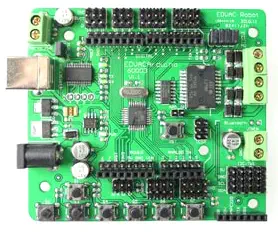
Arduino 328 microcontroller board
It is a microcontroller board based on the Arduino 168. It has 14 digital input/output pins (of which 6 can be used as PWM outputs), 8 analog inputs, a 16 MHz crystal oscillator, a USB connection, a power jack, an ICSP header, and a reset button. It contains everything needed to support the microcontroller; simply connect it to a computer with a USB cable or power it with a AC-to-DC adapter or battery to get started.
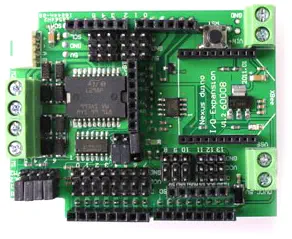
Nexus Robot provides the ultimate functional expansion for Arduino IO Expansion V1.2 and gives you extra ease to connect device such as sensors, servo and RS485 device. This sensor expansion board is able to easily connect a number of commonly used sensors.
- 4 x 100mm Aluminum Mecanum wheels
- 3 x 12V DC coreless motors
- Arduino 328 controller
- Arduino IO expansion V1.1
- 12V Ni-Mh battery
- 12V charge
- 4 x 100mm Aluminum Mecanum wheels
- 4 wheels drive
- Mecanum wheels
- Aluminum alloy body
- Capable of moving forward, backward, sideway, rotation
- Programmable with C, C++