













Description
- 4 Wheels drive
- Easy to assemble
- Aluminum alloy frame
- Speed: 0.6m/s
- Moves in any direction without turning the orientation
- Comes assembled with only wheels not attached
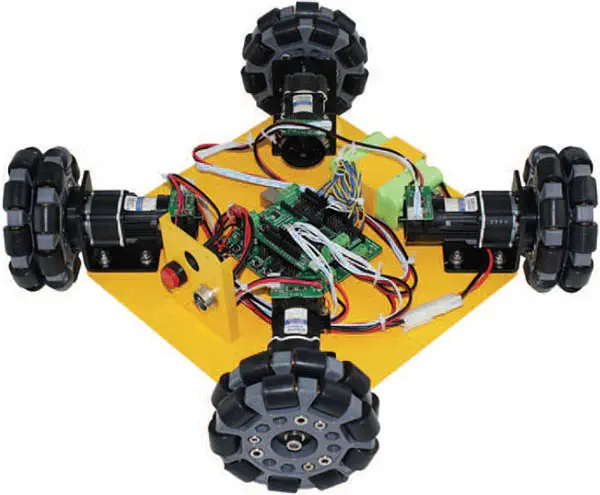
Nexus Robot introduces the 4WD Omni-Directional Arduino Compatible Mobile Robot Kit. It includes microcontroller, IO expansion, DC motor with encoder and by varying the speed and direction of each wheel it can move in any direction without turning its orientation. It is a learning kit for you to learn and enjoy the fun of omni direction moving.
Omni-directional wheels are unique as they are able to roll freely in two directions. It can either roll like a normal wheel or roll laterally using the wheels along its circumstances. Omni-direction wheels allow a robot to convert from a non-holonomic to a holonomic robot. A non-holonomic robot that uses normal wheels has only 2 out of 3 controllable degrees of freedom which are - moving forwards/backwards and rotation. Not being able to move side ways makes a robot slower and less efficient in reaching its given goal. The holonomicomni-directional wheels are able to overcome this problem, as it is a highly maneuverable. Unlike normal non-holonomic robot, the holonomic omni-directional robot can move in an arbitrary direction continuously without changing the direction of the wheels. It can move back and forth, slideways and rotates at the same position.
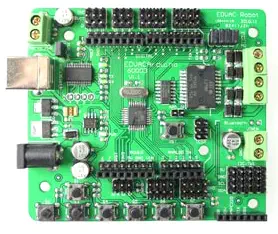
Arduino 328 microcontroller board
It is a microcontroller board based on the Arduino 168. It has 14 digital input/output pins (of which 6 can be used as PWM outputs), 8 analog inputs, a 16 MHz crystal oscillator, a USB connection, a power jack, an ICSP header, and a reset button. It contains everything needed to support the microcontroller; simply connect it to a computer with a USB cable or power it with a AC-to-DC adapter or battery to get started.
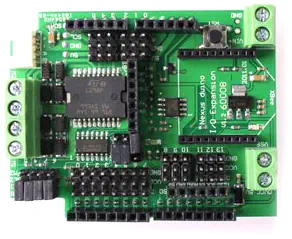
Arduino IO Expansion
Nexus Robot provides the ultimate functional expansion for Arduino IO Expansion V1.2 and gives you extra ease to connect device such as sensors, servo and RS485 device. This sensor expansion board is able to easily connect a number of commonly used sensors.
- 100mm omni wheel X 4
- DC motor with encoder X 4
- Microcontroller X 1
- IO expansion board X 1
Chassis:
- Appearance: Square
- Max width: 402mm
- Height: 100mm
- Chassis height: 21mm
- Wheel base: 260mm
- Coupled mode: Compaction
- Material: Aluminium Alloy
- Color: Yellow, Black
- Speed: 0.6m/s
- Drive Mode: 4 wheel drive
- Climbing capacity: 20 degree
- Load capacity: 10kg
- PC104 compatible: Yes
Wheel:
- Type: 90 degree Omni Wheel
- Diameter: 100mm or 123mm
- Thickness: 38mm
- Material: Polyurethane
- Load capacity: 20kg
- Diameter of Roller: 19mm
- Length of Roller: 19mm
- Coupled Mode: Brass Tube or bearings