








Description
- LimX Dynamics TRON 2 EDU Dual-Arm Embodied Robot
- Dual 7-DoF arms with 70 cm workspace reach and spherical human-like wrist design
- 10 kg combined arm payload with 5 kg per arm extended and ±0.5 mm repeat positioning accuracy
- VR teleoperation via Oculus Quest 3 with 100 ms latency and active safety boundary protection
- Intel Core i7-1165G7 AI computing module with 2 TB storage and ROS1/ROS2 support
- Native VLA platform with ACT/Pi 0.5 classic models and 10,000+ open-sourced real-world datasets
- Python and C++ SDK with NVIDIA Isaac Sim, MuJoCo, and Gazebo simulator compatibility
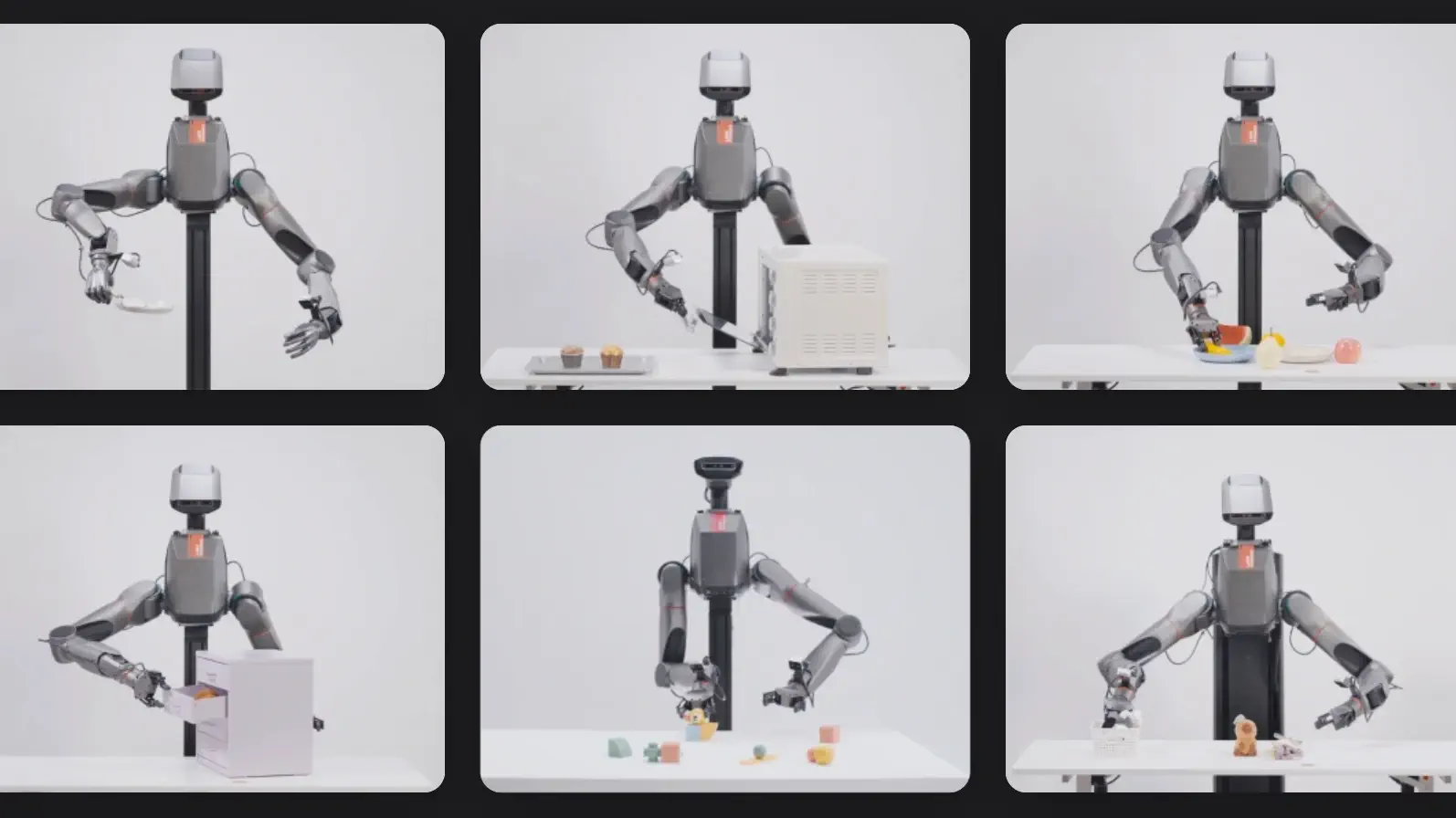
LimX Dynamics TRON 2 EDU Dual-Arm Embodied Robot is a high-performance dual-arm manipulation platform developed by LimX Dynamics, purpose-built for Vision-Language-Action research, teleoperated data collection, and bimanual task development. Each arm features seven degrees of freedom with a spherical wrist design that enables wide-range articulation across the full 70 cm workspace, producing natural postures and precise end-effector placement for complex manipulation tasks. Active safety boundary protection covers the head, body, stand, and desktop zones, while a dual redundant power design keeps the arm modules in a locked safe state in the event of unexpected power loss. Suited for academic research labs, AI development teams, and robotics engineering programs focused on manipulation, dexterous control, and embodied learning.
Perception is handled through RGB-D cameras positioned at the head and wrist, providing full-field visual coverage of the manipulation workspace for accurate closed-loop feedback during both autonomous and teleoperated operation. VR-based dual-arm control via Oculus Quest 3 delivers low-latency remote operation, enabling efficient high-quality trajectory demonstration recording for imitation learning workflows. The integrated VLA development platform consolidates data collection, annotation, model training, and inference into a single streamlined interface, with a large library of open-sourced datasets and classic models including ACT and Pi 0.5 available immediately. With a fully open SDK, ROS1/ROS2 compatibility, and support for NVIDIA Isaac Sim, MuJoCo, and Gazebo, this autonomous robot platform is designed to serve researchers, university laboratories, and development organizations accelerating progress in embodied AI and dexterous manipulation.

Genuine products with manufacturer-approved warranty coverage.

Customs, inspection, and prep handled locally before shipment.

Sales, support, and returns managed by one team.

Docs, tutorials, and community answers to move faster.



A dedicated dual-arm research platform combining precision manipulation hardware with a complete AI development ecosystem for VLA model training and dexterous task execution.
Each 7-DoF arm offers wide-range articulation with a spherical wrist for natural posture generation across a 70 cm workspace. Industry-leading motion algorithms deliver stable, balanced control during complex bimanual and single-arm manipulation tasks.
The integrated platform consolidates data collection, cleaning, annotation, model training, and inference into a single unified interface. Classic models including ACT and Pi 0.5 are preloaded alongside 10,000+ open-sourced real-world datasets for immediate use.
Cameras at the head and wrist positions deliver full visual coverage of the manipulation workspace for closed-loop feedback during both teleoperated and autonomous task execution. The full-field arrangement eliminates blind spots across the complete arm range of motion.
Python and C++ SDKs provide full high-level and low-level control access with ROS1 and ROS2 compatibility and clear URDF models optimized for Sim2Real performance. Support for NVIDIA Isaac Sim, MuJoCo, and Gazebo enables simulation-first development workflows.


| • | TRON2 Main Body (includes two upper arms) |
| • | TRON2 Lower Arm Ends ×2 (includes two grippers) |
| • | TRON2 Head Unit (vision & audio sensing head) |
| • | Wrist D405 Camera Set ×2 (includes cameras, mounts, and data cables) |
| • | TRON2 Battery & Charging Dock (includes power adapter) |
| • | Remote Controller |
| • | Oculus Quest 3 Kit (for VR-based data collection and teleoperation) |
| • | Dev Expansion Module |
| • | Dual-Arm Tool Kit (specific assembly tools for arms) |
| • | User Manual & Certificate of Quality |
| • | Fixed Stand & Fixed Base (DA model, boxed separately) |
Package contents vary by configuration. Mobile (DAU) variant includes Lifting Stand & Mobile Chassis in place of Fixed Stand & Base. Confirm final box contents with sales prior to ordering.
| • | 70 cm per arm |
| • | 85 mm (3.35 in) |
| • | 7 |
| • | Aluminum Alloy and Plastic |
Overall body dimensions depend on the mounting stand configuration. Values shown are from the manufacturer's reference.
Documentation