







Included in this bundle
- 1 X RB-Lyn-1230 - Lynxmotion SES-PRO 550mm 6Dof Modular Robotic Arm Sub Kit (SO)
- 1 X RB-Lyn-1233 - Lynxmotion SES-PRO 100-240VAC to 36VDC 30A Power Supply w/ Emergency Stop (SO)
Description
- Modular, customizable & reconfigurable semi-professional arm
- Easy to use with human-readable communication protocol
- High accuracy and competitive payload capacity
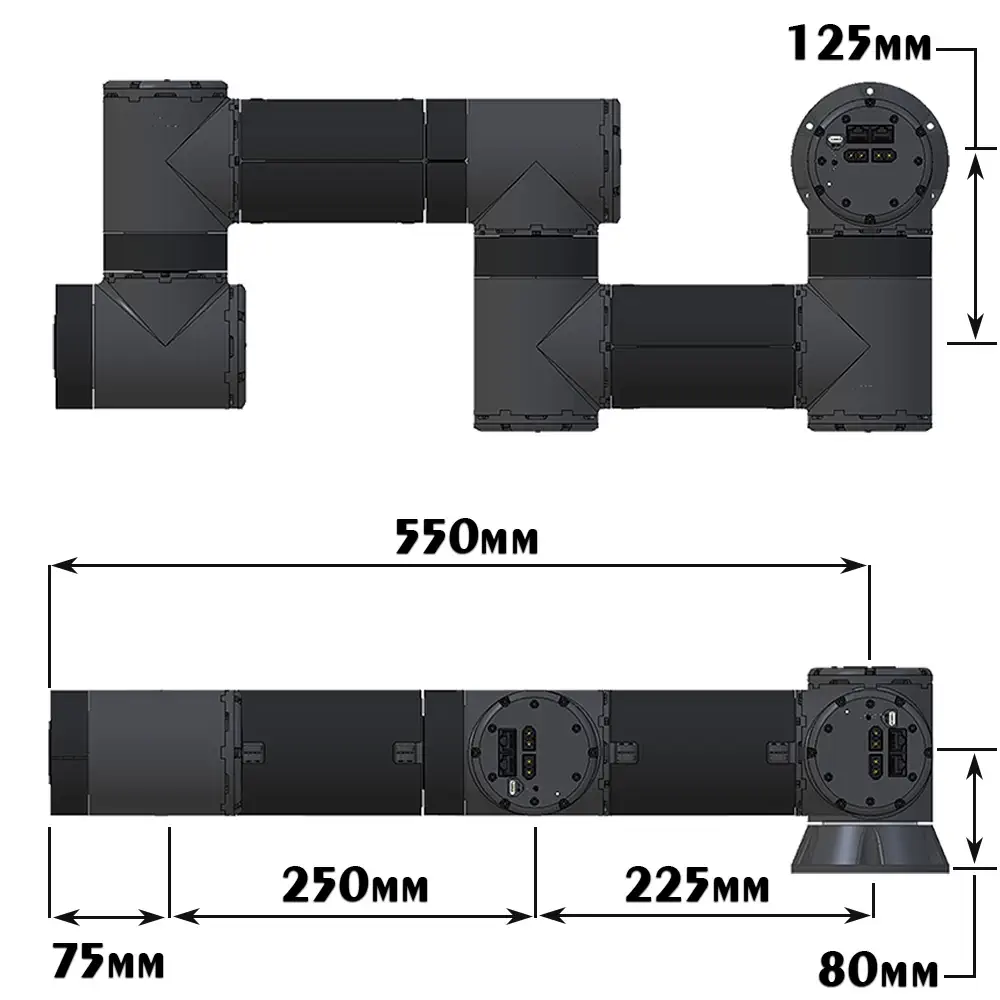
- 550mm horizontal extension
- 2kg payload and ±0.1 mm accuracy at full reach
- Gripper sold separately
![]()
The Lynxmotion SES-PRO 550mm 6Dof Modular Robotic Arm Kit offers a payload of 2Kg at full extension with an accuracy of ±0.1 mm. Unlike purpose-built arms, this is designed to be modular and reconfigurable to suit the user’s application. Additional degrees of freedom can be added, and existing degrees of freedom can be reconfigured or removed. The design ensures there are no evident pinch points.

Lynxmotion SES-PRO Modular Robotic Building System
Incorporates six Lynxmotion Professional Smart Servo actuators
- Strain wave gearing
- NEMA Stepper motors
- Onboard electronics
- Microcontroller
- Motor controller
- Voltage regulation
- IMU (accel & gyro)
- CAN communication
- Absolute angular feedback
- Human readable communication protocol
- … more

DH-Robotics 2 & 3 Fingers Grippers shown on the Lynxmotion SES-PRO 550mm 5Dof Arm Kit
The Lynxmotion SES-PRO Modular Robotic Arms are fully supported by ROS2, providing seamless integration for users looking to incorporate them into various robotics projects. These arms are designed to work with the ROS2 framework, enabling robust communication, control, and customization through standard ROS2 tools and libraries. Comprehensive ROS2 support is available through the official GitHub repository, where users can access dedicated packages for easy setup and deployment. This compatibility ensures smooth integration into a wide range of applications, from research and development to advanced automation tasks.
- 3x Lynxmotion Smart Servo PRO Lite (LSS-P-L1)
- 3x Lynxmotion Smart Servo PRO Standard (LSS-P-S1)
- 4x Lynxmotion SES-PRO Aluminum Clamp for 70mm CF Tubes
- 1x Lynxmotion SES-PRO 118mm x 70mm Carbon Fiber Tube
- 1x Lynxmotion SES-PRO 143mm x 70mm Carbon Fiber Tube
- 1x Lynxmotion SES-PRO Base for Lite or Standard LSS-P Actuators
- 1x Lynxmotion SES-PRO Arm Base Adaptation Plate
- 2x Lynxmotion Branded Neoprene Tube Covers
- 36V Power supply
- Cables (USB, CAT5, Power)
- Mounting hardware
Compatible Grippers:
- Lynxmotion SES-PRO DH Robotics PGE-50-40 Two Fingers Gripper Kit
- Lynxmotion SES-PRO DH Robotics CGE-10-10 Three Fingers Gripper Kit
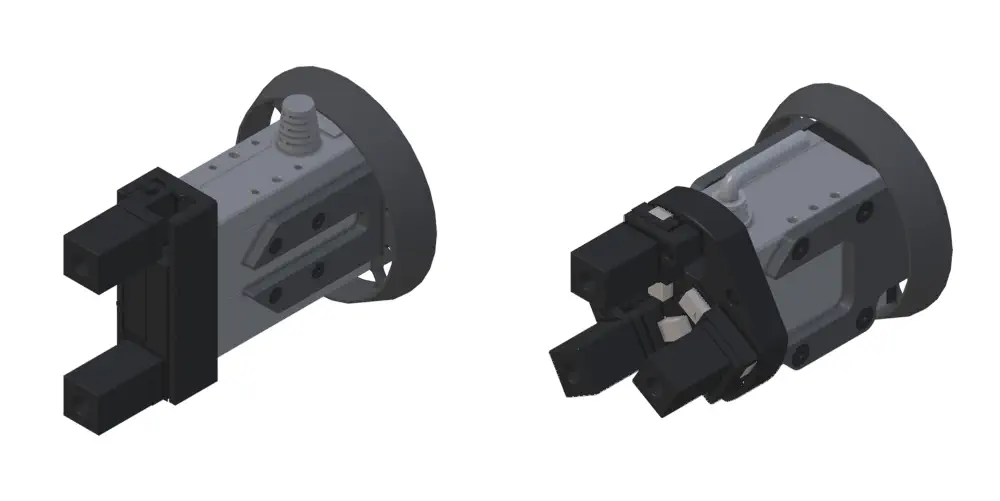
DH-Robotics Two Fingers PGE-50-40 & Three Fingers CGE-10-10
- Reach: 550mm
- Repeatability: Coming soon
Websites
- SES-PRO Modular Robot System
- SES-PRO Robot Manipulator Arms
- Github SES-P-ROS2-Arms
- Github LSS-P-ROS2-Hardware
Wikis
- Lynxmotion SES-PRO 550mm 6 Dof Robotic Arm Information & Guides
- Lynxmotion SES-PRO Robotic Arm User Interface Software
Blog
- A Sneak Peek into Lynxmotion's Upcoming Professional Modular Robot Building System
- Lynxmotion PRO Modular Robotic Arms Now Support ROS2!
Related
- Lynxmotion SES-PRO Modular System & Robotic Arms
- Lynxmotion SES-PRO Robotic Arms
Lynxmotion SES-PRO Modular Parts Lynxmotion Smart Servos PRO
General
- Horizontal reach: 550mm
- Vertical reach: 630mm
- Degrees of Freedom (DoF): 6
- Payload: 2Kg (no gripper) at full reach
- Collision detection: No
Mechanical
- Vertical reach: 630mm
- Joint 1: S1 ±360° (cable slack)
- Joint 2: S1 ±180°
- Joint 3: S1 ±180°
- Joint 4: L1; ±180°
- Joint 5: L1; ±180°
- Joint 6: L1; ±180°(cabled gripper) or infinite
- Motors: NEMA 17 & 24
- Gearing: 100:1 Strain wave (aka “Harmonic drive”)
Electrical
- Power Supply: 120V - 220V AC to 36V DC
- Emergency Stop Button & Protection Fuse
- Type B (USA) Plug (Standard Power Cable)
- Battery power alternative: 8 cell (8S) or 9 cell (9S)
- Wiring: external
Communication
- Communication method between servos: CAN Bus (custom)
- Communication method to first servo: USB (USB 3 suggested)
- Communication protocol: LSS-P (human readable)